强化学习(2)- DP and MC
动态规划(DP)和蒙特卡洛(MC)都是RL的早期方法,虽然早已不再使用,但它们仍是后续一系列方法的重要基础
DP和MC都属于表格方法(tabular method),因为其假设MDP的状态空间和动作空间均离散且非常小,从而value function的取值可以用一个表格表示
与之相对的,近似方法(approximation method)用于解决状态/动作空间连续或非常大的情况,其使用一个参数化函数$f(s,a,\theta)$来近似value function
DP
DP方法是一类model-based方法,即MDP的状态转移概率已知
这里介绍两个DP方法——策略迭代 (Policy Iteration) 和值迭代 (Value Iteration)
策略迭代方法迭代地进行如下两步以使策略收敛至最优
- 策略评估 (Policy Evaluation) :对于当前策略$\pi$,计算所有状态对应的state-value $V_{\pi}(s)$
- 策略提升 (Policy Improvement) :利用策略评估得到的$V_{\pi}(s)$为每个状态寻找更优的策略
值迭代方法直接迭代得到最优的state-value,并通过最优state-value直接得到最优策略
Policy Iteration
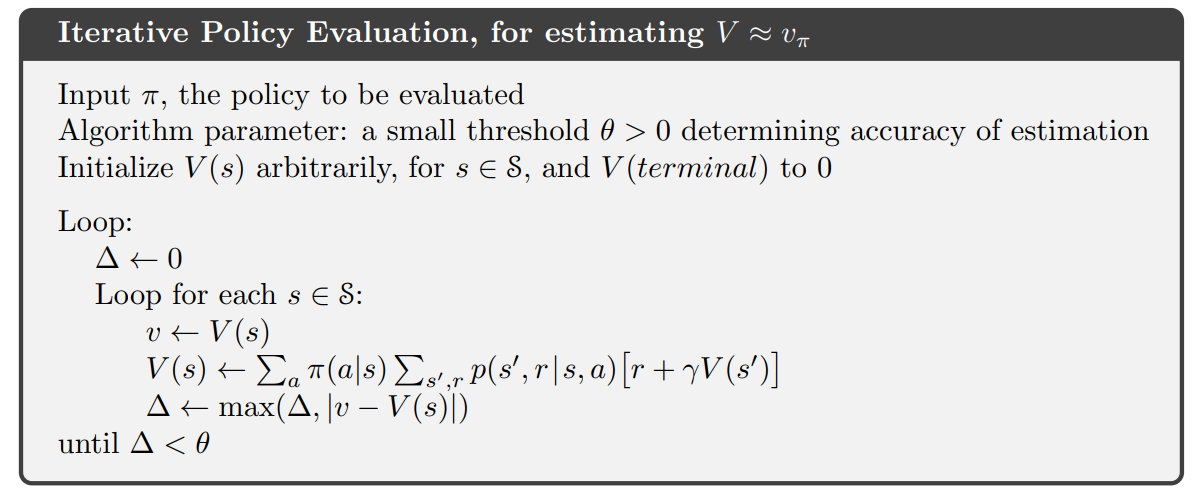
对于给定的策略$\pi$,Policy Evaluation旨在计算所有状态的state-value
首先随机初始化$v_0$,然后使用bellman equation进行迭代
该算法称为迭代策略评估 (Iterative Policy Evaluation)
可以证明当迭代次数趋于无穷时,迭代序列${vk}$是收敛于$v{\pi}$的,实际中只要差值足够小时就可以判断为已近似收敛
通过Policy Evaluation我们已经知道当前策略下每个状态的state-value
现在我们想知道能否改变策略获得更好的state-value,即Policy Improvement
假如我们在状态$s$选择一个动作$a\neq \pi(s)$,而后续仍继续服从策略$\pi$,那么新的累积收益为
若$q(s,a)\geq v_{\pi}(s)$,则说明当前选择动作$a$更好
于是我们可以很自然地得出结论——之后每次在状态$s$选动作$a$都会更好
因此我们可以使用贪心思想为每个状态得到新的策略
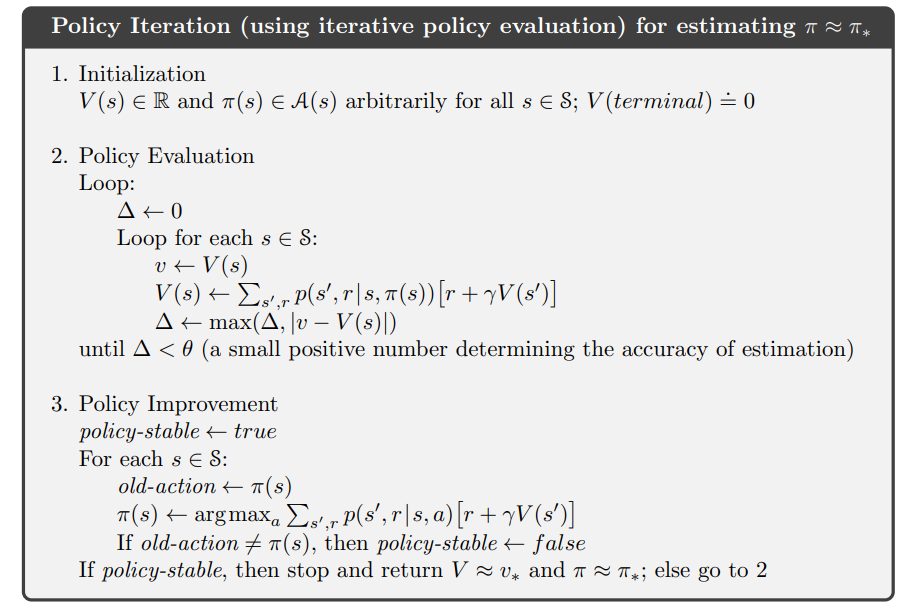
DP的Policy Iteration就是迭代地进行上述Policy Evaluation和Policy Improvement以获得最优策略的过程
当策略不再变化时,就可以认为已经得到了最优策略
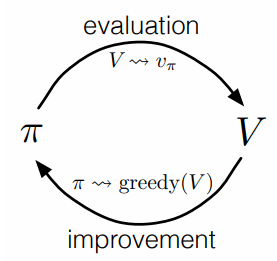
我们一般把遵循这种迭代过程的方法称为广义策略迭代(Generalised Policy Iteration, GPI)
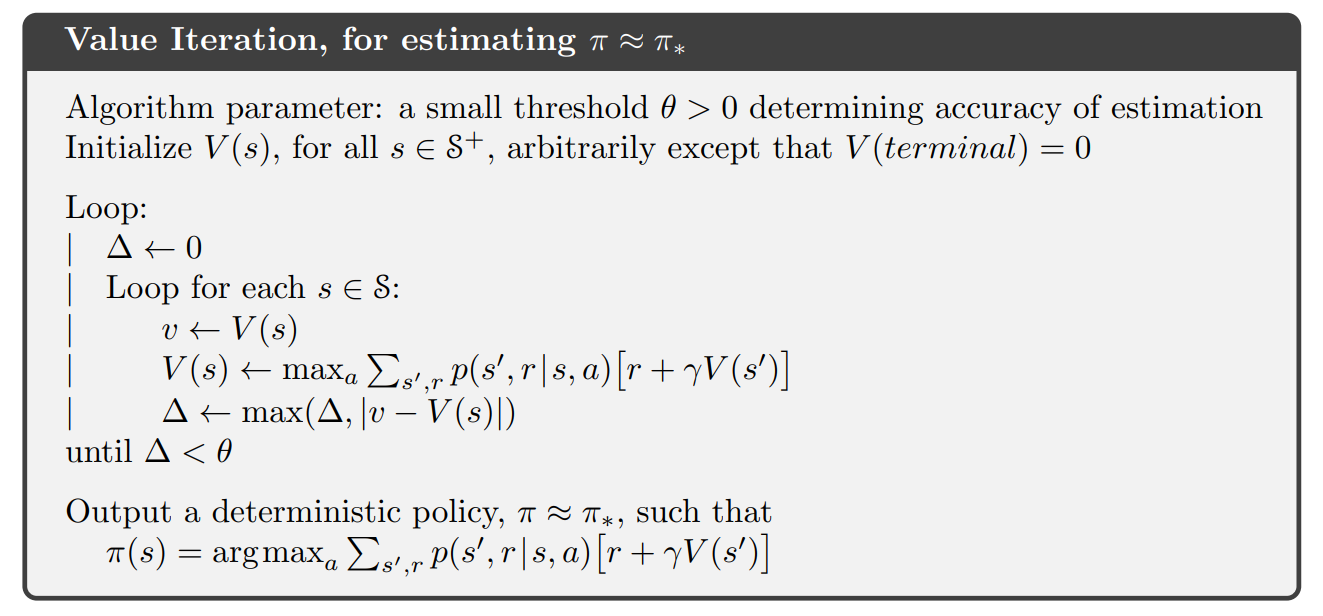
Value Iteration
利用贝尔曼最优方程$v^(s)=\maxa q{\pi^}(s,a)$,我们可以直接迭代得到最优的state-value
得到近似的$v^*(s)$之后,使用贪心方法就可以得到最优策略
Monte Carlo
MC方法是一种model-free方法,即MDP的状态转移概率未知
MC方法遵循广义策略迭代,不同的是,其policy evaluation对action-value进行估计,因为model-free问题中我们无法根据state-value得到最优策略
而对于policy improvement,MC方法同样采用贪心更新策略
State-Value估计
尽管MC方法估计的是action-value,但我们仍先以state-value为例来说明MC方法的思想
state-value function定义为$V_{\pi}(s)=E[U_t|s]$,即从状态$s$开始的未来累计折扣收益
对于给定的策略$\pi$,我们可以采样得到多个完整的episode
对于状态$s$,若$s$出现在某个episode中,则可以根据定义利用该episode计算$V{\pi}(s)$,对多个epsiode计算得到的$V{\pi}(s)$取平均即可得到其state-value估计值
显然一个状态$s$可能在同一个episode中出现多次,于是取平均分为两种方法
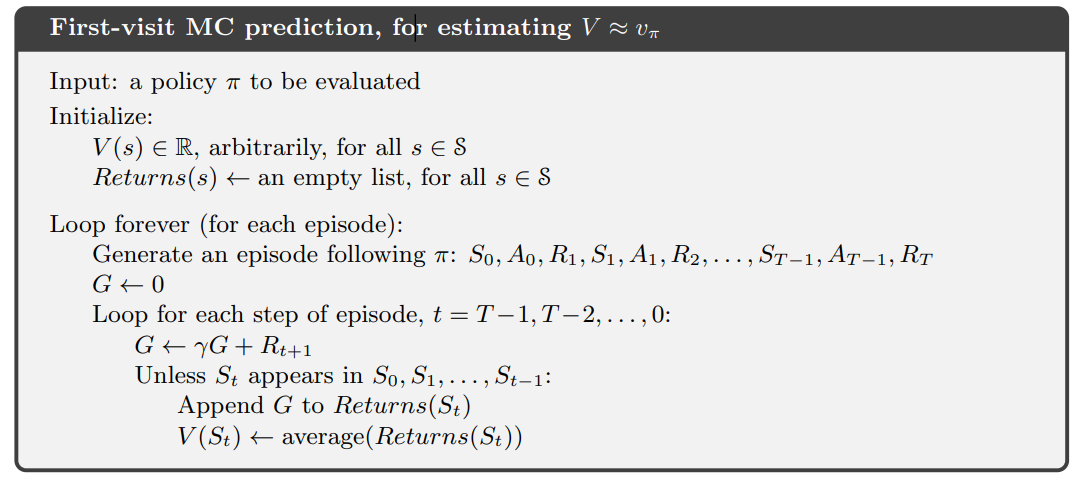
- 首次访问MC (first-visit MC) :对同一个episode,只有$s$第一次出现时的$V_{\pi}(s)$参与取平均
- 每次访问MC (every-visit MC) :对同一个episode,$s$每次出现时的$V_{\pi}(s)$都参与取平均
first-visit MC的伪码如下
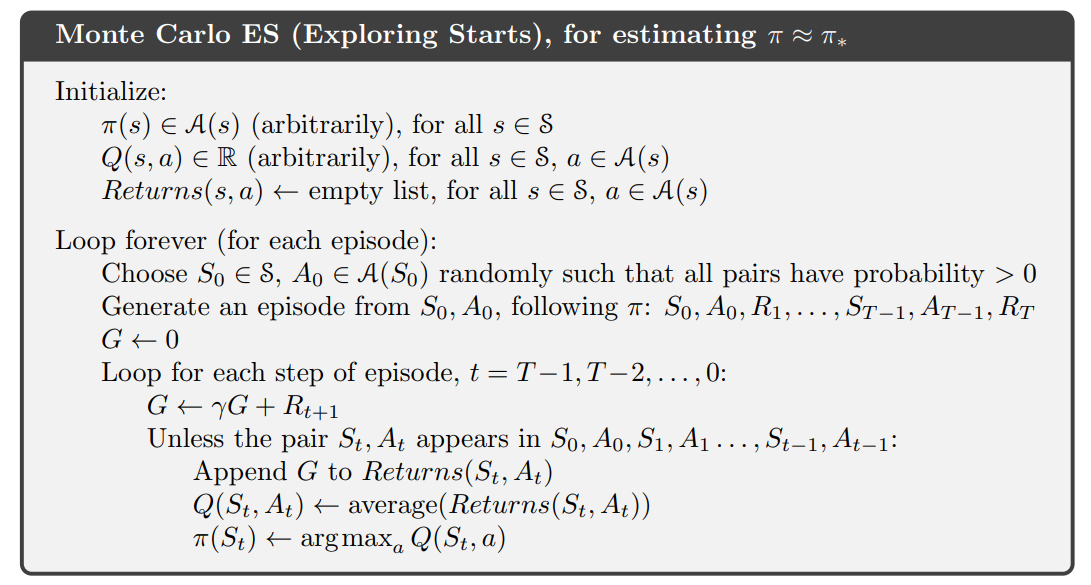
基于Exploring Starts的q(s,a)估计
使用MC对action-value进行估计存在一个问题——若使用确定性策略,则对于每个状态$s$只有动作$a=\pi(s)$会被访问,从而不属于策略$\pi$的$q(s,a)$不会被计算,也就无法进行policy improvement
一个简单的方法是每个episode采样开始时随机选择初始$(s,a)$对,称为exploring starts
这种方法下,当episode数趋于去穷时,所有$(s,a)$对的出现数量也都会趋于无穷
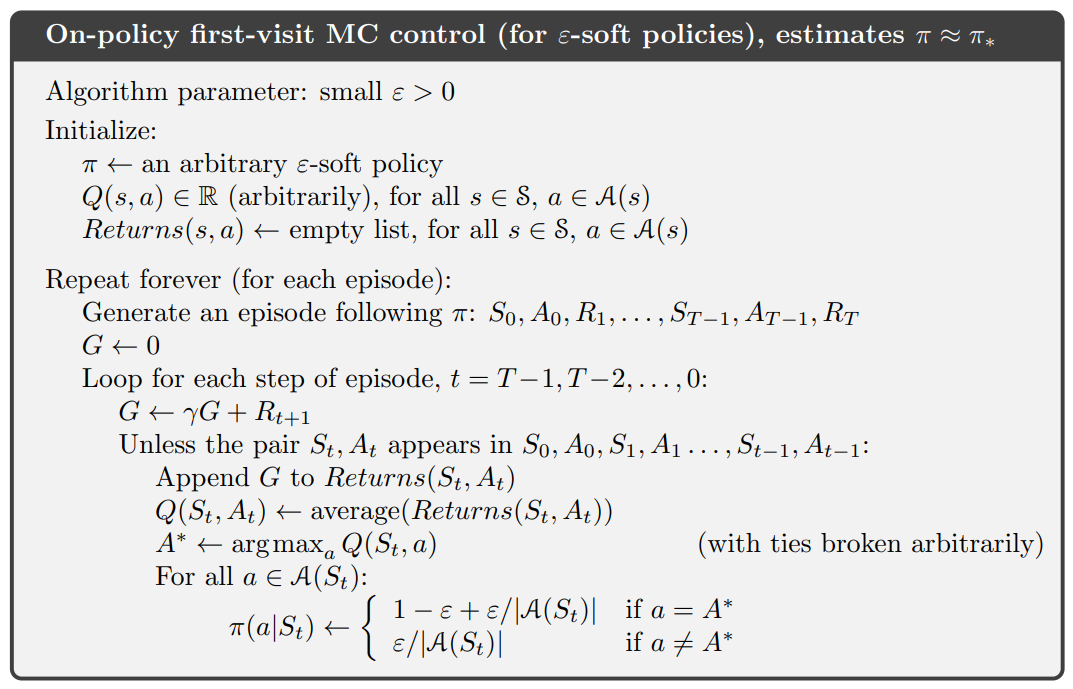
$\varepsilon$-greedy MC
显然,实际中Exploring Starts的“无穷”假设很难满足,因此我们介绍另外一种方法
先初始化软策略(soft policy),即对于任意$s\in S,a\in A$均有$\pi(a|s)>0$
之后在迭代过程中使得$\pi(a|s)$逐渐逼近为确定性策略$\pi(s)$
我们可以使用$\varepsilon$-贪心来实现这个思路——每轮使用当前采样的episode计算得到新的$q(s,a)$后,对于最优动作$a^=\arg\max_a q(s,a)$,更新策略$\pi(a^|s)=1-\varepsilon-\frac{\varepsilon}{|A(s)|}$,对于其他动作,更新策略$\pi(a|s)=\frac{\varepsilon}{|A(s)|}$
我们对该方法下策略的收敛性作一个简单证明,设策略提升后的策略为$\pi’$
因此策略提升后一定有$\pi’\geq \pi$