循环神经网络RNN
为了有效利用图像的空间信息,CNN取代了MLP
同样的,对于文本、音频这样含有前后关系的序列化信息,单独处理每个输入的前馈式网络无法有效处理
因此就有了循环神经神网络RNN(Recurrent Neural Net)
文本向量化
分词与词汇表建立
人类的语言多种多样,为了使神经网络更好的理解文本信息,就必须数字化描述文本,这一过程称为文本向量化
文本向量化有三种基本形式
- 将文本按单词分割,并将每个单词转换为一个向量
- 将文本按字符分割,并将每个字符转换为一个向量
- 将文本按n-gram分割,并将每个gram转换为一个向量
将文本分割的过程称为分词(tokenization),而分割出的每个单元称为标记(token)
分词后为了向量化每个token,需要先将其转换为数字形式
即需要建立一个词汇表(Vocabulary),其中包含所有单词到整数的一一映射,然后根据词汇表将单词转换为整数索引
以下面这个包含两个句子的文本为例
1 | str = ['The cat is learning keras', 'but the cat is coding with pytorch'] |
首先进行单词级分词
1 | [['the', 'cat', 'is', 'learning', 'keras'], ['but', 'the', 'cat', 'is', 'coding', 'with', 'pytorch']] |
然后建立词汇表并将文本整数索引化
建立词汇表的方法有很多,例如按单词出现频率顺序给定索引,使用hashing trick等等
不同的索引方法基本只是不同情况下的计算时间效率不同,对神经网络性能没有影响
1 | [[1, 2, 3, 4, 5], [6, 1, 2, 3, 7, 8, 9]] |
代码实现
keras中的Tokenizer类可以实现分词与词汇表建立一步到位
1 | from keras.preprocessing.text import Tokenizer |
pytorch中稍微复杂一些
1 | import torchtext |
文本索引化后还需要对索引向量化,主要有one-hot编码和词嵌入两种方法
one-hot编码
假设索引的最大值(不同单词的个数)为$n$
则每个单词表示为一个n维向量,向量中单词索引位置为1,其余都为0
例如对之前的句子one-hot编码为(句子先0填充至相同长度)
1 | [[[1. 0. 0. 0. 0. 0. 0. 0. 0. 0.] # 0 |
代码实现
接上一节keras代码
1 | # ... |
Tokenizer类的texts_to_matrix方法可以直接转换one-hot,但是和普通one-hot有一些不同
该方法将一个句子表示为一个n维向量,其包含的单词对应的索引位置为1,其余为0
1 | res = tokenizer.texts_to_matrix(text) # 将文本转换为one-hot编码 |
词嵌入
one-hot编码得到的文本向量有一个缺点
即向量维度可能非常大(可能上万),而且十分稀疏,这些特点会让神经网络学习效率变低
而词嵌入方式将得到低维且密集的向量,其常见的词向量维度只有256或512
获取词嵌入的方式主要有两种
- 让词嵌入作为神经网络的参数与主要任务一起参与学习,即词向量随机初始化,随网络学习而改变
- 使用其他机器学习任务中已计算好的预训练词嵌入
词嵌入要分不同的任务学习而不使用一个通用算法的原因是
文本可能存在不同语言语法结构不同、不同任务中同一语义关系重要性不同等等问题
因此不存在一个对所有文本都完美的词嵌入
这种通过学习向量化文本的方式也是相对one-hot的一个优点
代码实现
keras提供了Embedding层来学习词嵌入
Embedding层能将尺寸为(samples, seq_length)的输入变为(samples, seq_length, embedding_dim)的词嵌入
即将句子中每个单词变成一个embedding_dim维向量
1 | from keras.preprocessing.sequence import pad_sequences |
循环神经网络RNN
RNN原理
开头说了RNN是为了有效利用序列的前后关系而存在的
而RNN利用的方法就是循环
RNN接受一个尺寸为 (samples, timestep, input_features)的输入
对应到前述的词嵌入即 (samples, 句子单词数, 每个单词向量的维度)
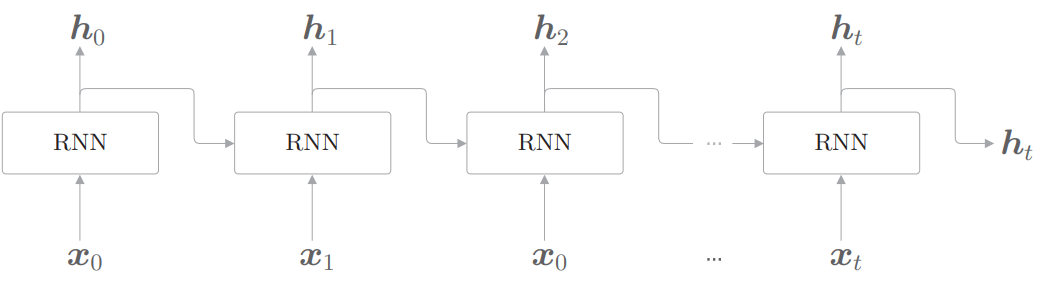
如图所示,其中每个方框称为一个RNN cell
当我们将一个句子送入RNN时,RNN会逐个timestep(逐个单词)地处理句子,即一个cell处理一个单词
第$t$个timestep(第$t$个单词)对应cell的计算为
其中$h$为某个timstep的输出向量,$U$为对输入$\boldsymbol{x}$的权重,$W$即循环连接的权重
每个cell的$W,U$是相同的,也即权重共享
RNN就是靠W这条连接做到记忆之前timestep的
显然RNN处理后的输出尺寸为(samples, timesteps, output_features)
注意到因为$ht$已经包含了对所有$x_1$到$x{t-1}$的处理结果
因此RNN也可以只取最后一个输出$h_n$,即输出尺寸为 (samples, output_features)
keras实现
代码使用了keras内置的“IMDB 电影评论情感分类数据集”
包括25000条电影评论,分为正面/负面评论,文本已按单词出现频率顺序转换为整数索引
keras中的simpleRNN层默认输出尺寸为 (samples, output_features)
若要堆叠多个simpleRNN层,需要传入return_sequences=True,使其输出尺寸为(samples, timesteps, output_features)
1 | SimpleRNN(32, return_sequences=True) |
以下为完整代码
1 | import numpy as np |
长短期记忆LSTM
LSTM的提出
虽然普通的RNN理论上可以记住所有之前timestep的信息
但实际应用中因为梯度消失,其表现并不那么好
这里的梯度消失和CNN、MLP等前馈式网络的梯度消失有一些不一样
前馈式网络的梯度消失指反向传播时梯度过小无法更新
而RNN的梯度消失是指正向传播中间隔的timestep过长导致信息传递量几乎为0
长短期记忆LSTM(Long Short-Term Memory)的出现就是为了解决这一问题
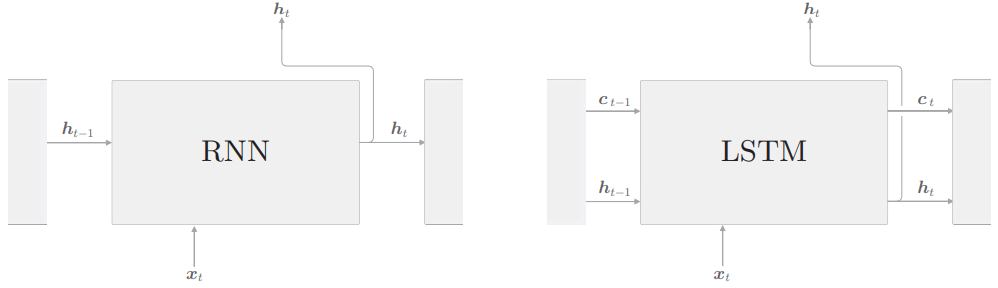
如图所示,LSTM相对RNN多了一条记忆单元$c$
$c$的作用是筛选并保存t及t之前timestep的必要信息,而不是像原始RNN一样全部保留
LSTM中的计算基于“门”的思想
可以用水阀类比门,水阀可以控制0~100%的水流量,而门控制数据的传输比率
显然门应该用sigmoid函数激活
LSTM每个cell有三个门,下面依次说明
输出门
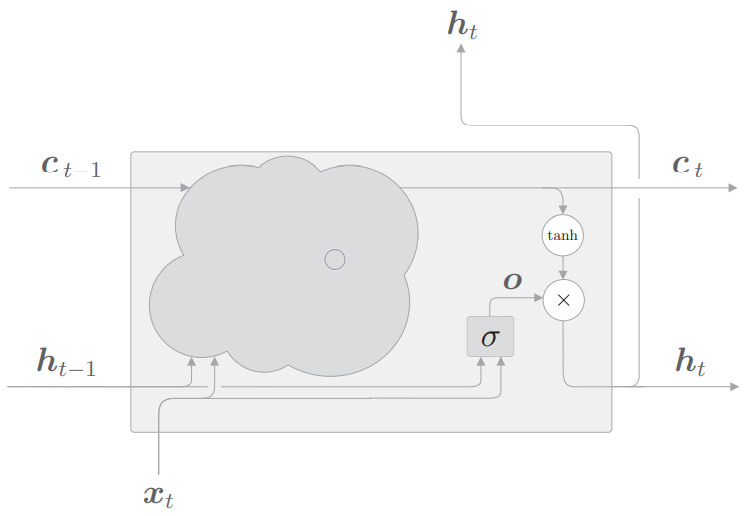
首先输出门的公式为
其中$\sigma(x)$表示sigmoid函数,$\bigodot$表示矩阵对应元素相乘(element-wise multiply)
即$\mathrm{tanh}(ct)$为原输出,$\sigma(U_ox_t+W_oh{t-1})$为对输出的流出比率控制
遗忘门
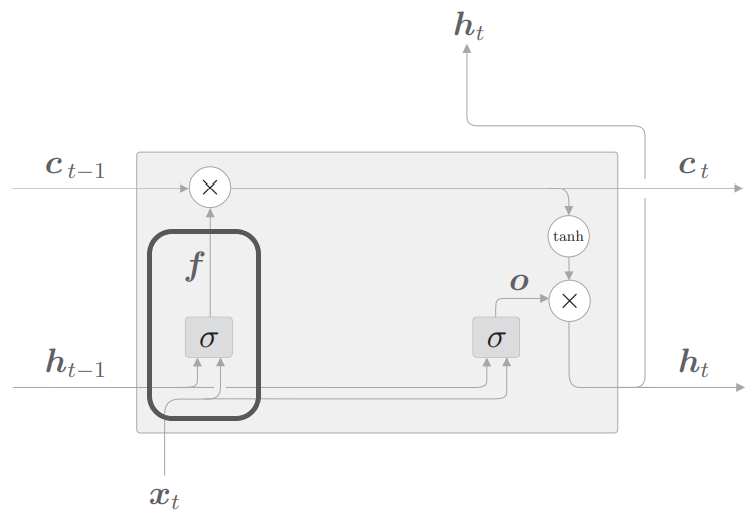
遗忘门公式为
顾名思义,遗忘门是遗忘之前保留下来的信息$c_t-1$的比例
之后我们将把下式加入到$c_t$的更新中
输入门
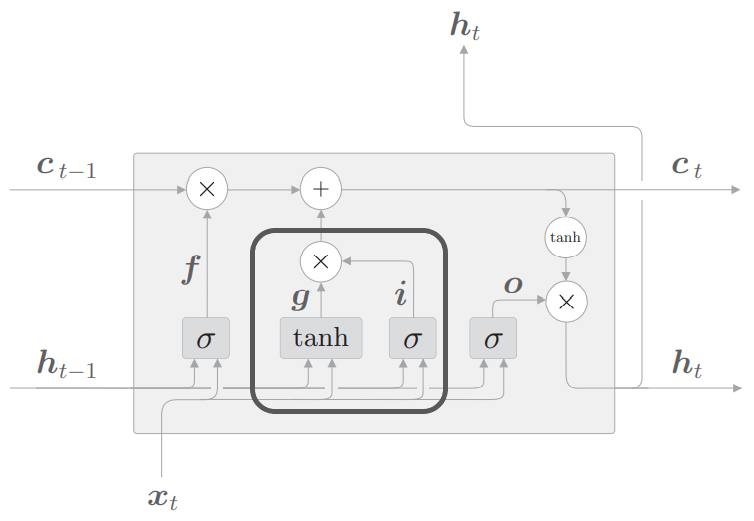
输入门公式为
之前遗忘门已经完成了对之前timestep的遗忘,现在还需要加入当前timestep的新信息
也即$\tilde{c}_t$表示新信息,$i_t$表示新信息加入的比例
至此我们就可以得到$c_t$的完整更新公式
注意上述更新公式中不同门的权重矩阵$U, W$都是不同的
但是不同LSTM cell的相同门权重矩阵是相同的,也即权重共享
LSTM的输入输出和普通RNN还是一样的
keras中已有LSTM层,只需将上面代码中的simpleRNN换成LSTM即可
门限循环单元GRU
门限循环单元GRU(Gated Recurrent Unit)是一种LSTM的变体
他在大多数情况下表现和LSTM相当,且计算量更小
同样keras中已有GRU层可以直接调用
双向RNN
显然序列有正序和逆序之分,之前的RNN处理都只从一个方向开始顺序处理序列
然而实际中我们并不知道正序和逆序哪个更容易提取信息
这时仅处理一个顺序就可能丢失一些有用信息
应对这种情况就要用到双向RNN
它会用RNN从两个方向分别处理一次序列,并以某种方式合并得到的两个结果
可以用keras中的Bidirectional层实现双向RNN
1 | from keras.layers import SimpleRNN, LSTM, Bidirectional |
卷积与RNN
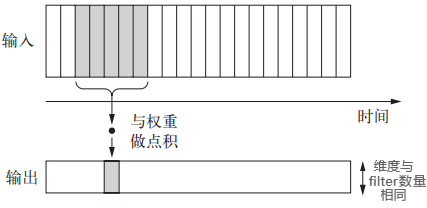
卷积在图像的二维空间信息处理中取得了很大成功
基于同样的思想,我们也可以用一维的卷积处理序列的局部信息
keras中的Conv1D层接受尺寸为(samples, time, feature_dim)的输入
在有padding的情况下输出尺寸相同
同理pooling也可以在序列数据上操作
然而,如果只用卷积处理序列,效果可能仍然不会优于RNN
合理的做法是先用多个卷积和池化层提取序列局部特征,再输入RNN处理
以NLP为例,这样做可以先学到一定的上下文关系信息,使得RNN更容易处理
相较于堆叠多个RNN层,这样做的计算代价也会更小