卷积神经网络CNN
什么要CNN
在之前的mnist分类中,我们构造了一个只包含全连接层的网络
为了将图片输入到这样的网络中,我们先对图片进行了一维展开
然而显然图片本身具有二维的空间信息,一维展开相当于直接丢弃了这部分信息
而卷积神经网络CNN(Convolution Neural Net)就是为了更好的利用起这部分信息而存在的
卷积运算
卷积层与滤波
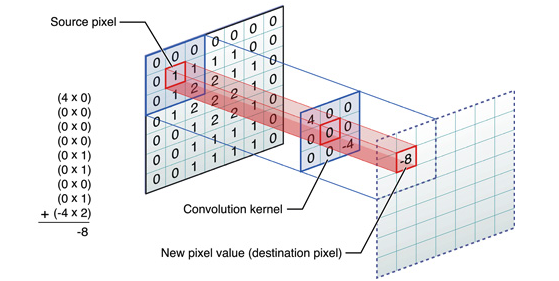
卷积运算与传统图像处理的滤波操作是基本相同的
首先除了图像本身我们需要还一个卷积核
然后对于图像的每一个像素点,计算它的邻域像素和卷积核的对应元素的乘积并累加,作为输出图像该像素位置的值
即完成了一次卷积运算
唯一与滤波不同的是,卷积核的参数是可学习的
注意到神经网络每层还应该有偏置
在卷积神经层中,偏置也是一个单独的数,会在卷积运算完成后加到输出图像上的每个像素位
一般情况下,我们将卷积层的输入输出数据都成为特征图(feature map)
步幅与填充
卷积运算中每次卷积核移动的步长称为步幅(stride)
显然卷积核步幅越大,卷积完成后的输出特征图尺寸就越小
即使步长为1,输出特征图尺寸相较输入特征图也会缩小
这时候为了保持输出特征图尺寸不变或缩小指定尺寸,就需要填充(padding)
即在输入特征图的四周添加多余的像素点,扩大输入图的尺寸
填充的方法有反射填充、0填充,重复填充等,一般0填充使用较多
假设输入图像尺寸为$(H,W)$,卷积核尺寸为$(FH,FW)$,输出为$(OH,OW)$,填充为$P$,步幅为$S$,则有
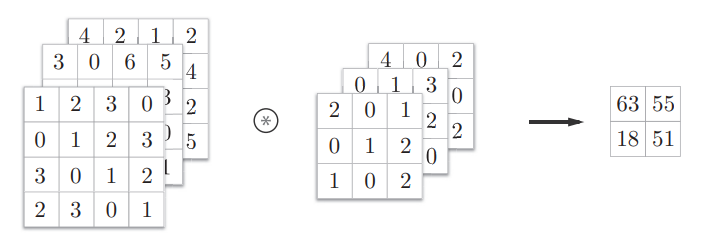
三维图像的卷积
很多情况下图像数据并不止二维,它还包含了第三维的颜色通道(channel)
灰度图像是只有1个颜色通道的特例,彩色图像通道方向深度一般是3
这时我们的卷积核也应该是三维的,且第三维深度与图像颜色通道数相同
卷积运算需要对每个通道分别进行,然后将三个通道的输出图对应位置相加(element-wise addition),得到最终的输出特征图
我们总是希望CNN中每个卷积层可以多提取信息,但每次卷积后特征图的通道数就变为了1
因此一般每个卷积层都会有不止一个滤波器
设输入数据尺寸为$(C,H,W)$,滤波器尺寸为$(FN,C,FH,FW)$,则输出尺寸为$(FN,OH,OW)$,其中C为通道,FN为滤波器个数
下采样与池化
图像的下采样即降低图像分辨率(缩小尺寸),并尽可能保留关键信息
池化层(Pooling)是卷积神经网络中经典的下采样手段
池化一般分为最大池化和平均池化
以最大池化为例,池化层用一个n×m的窗口依次滑过输入特征图,每次只留下窗口中的最大值
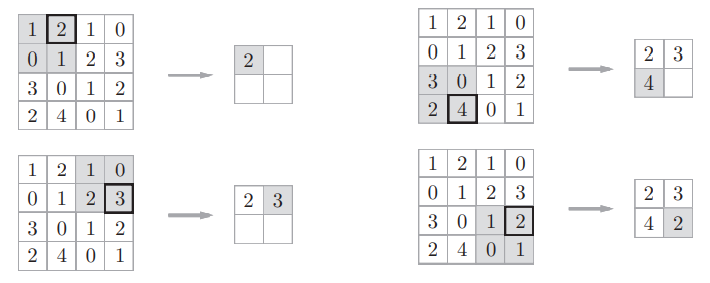
池化层有一个重要的特征,数据的微小扰动不会对结果造成较大影响
池化层是没有参数的,也即不需要神经网络学习
且池化后特征图的通道数不会发生变化
实际上,池化操作存在很多问题
现在大多数CNN已经不再采用池化,而是直接以带步长的卷积代替了
空洞卷积
空洞卷积(Dilation Convolution)最早出现于图像分割研究中
其目的是代替pooling做减小尺寸并增大感受野的操作
如图所示,空洞卷积就是在卷积域中增加了空洞
假设空洞卷积核尺寸为$D$,则卷积层的输入输出尺寸为
关于空洞卷积作用的讨论有很多,此处不展开说明
上采样
上采样是和下采样相对的概念,即需要增大图像的分辨率
上采样有三种方法,分别为插值、UpPooling和反卷积
UpPooling即最大池化反向操作,将最大值以外的位置用0填充
反卷积(deconvolution)先按照一定的比例进行0填充扩大尺寸,再进行一次正常卷积
关于UpPooling+Conv实现上采样和反卷积实现上采样的优劣有很多讨论,此处不展开说明
Pytorch使用CNN进行Mnist分类
与Pytorch入门——线性回归与分类中只有网络定义部分不同
1 | class Classifier(nn.Module): |
Keras使用CNN进行Mnist分类
与Keras入门——线性回归与分类中只有网络定义部分不同
注意keras以tensorflow为后端时默认的图片通道在第三维
1 | def buildNet(): |